Automatic Detection Algorithms
AI-powered road inspection, from subsurface to surface to 3D space.
An integrated technical portfolio covering ground penetrating radar, pavement image intelligence, and 3D laser point cloud analytics — engineered for rapid, non-destructive highway structural defect inspection at traffic speed.

Built for engineering teams, asset managers, and infrastructure operators who need scalable non-destructive inspection with interpretable, high-resolution AI outputs — covering subsurface, surface, and spatial geometry within one technology stack.
Core Capabilities
Three detection modules, one inspection workflow.
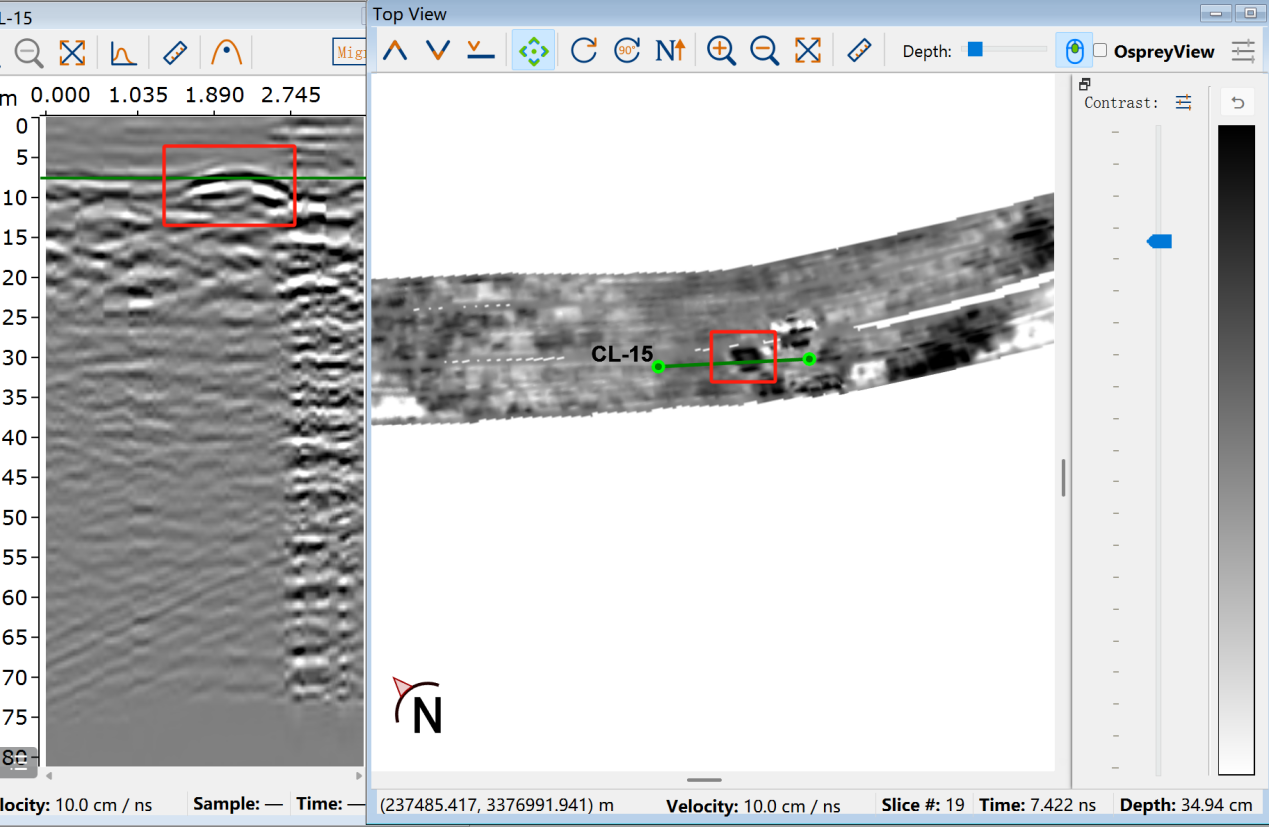
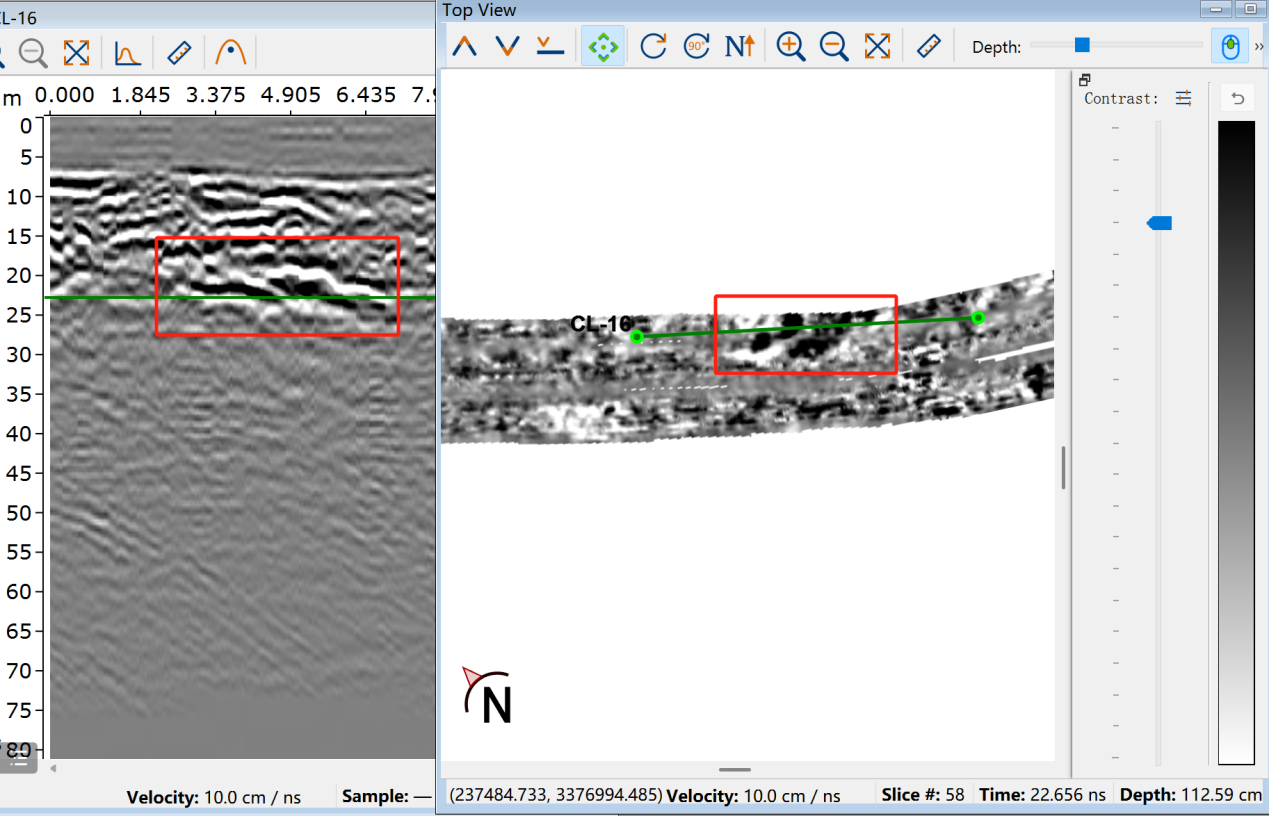
01 · Ground Penetrating Radar
3D GPR acquisition & AI-based subsurface interpretation
The 3D GPR system integrates a 31-channel antenna array, RTK positioning and wheel-encoder triggering. It installs within 10 minutes and provides an effective coverage width of 1.8 m. At a detection speed of 80–100 km/h, it collects longitudinal, transverse and horizontal subsurface information without traffic closure — supporting rapid highway structural defect inspection.
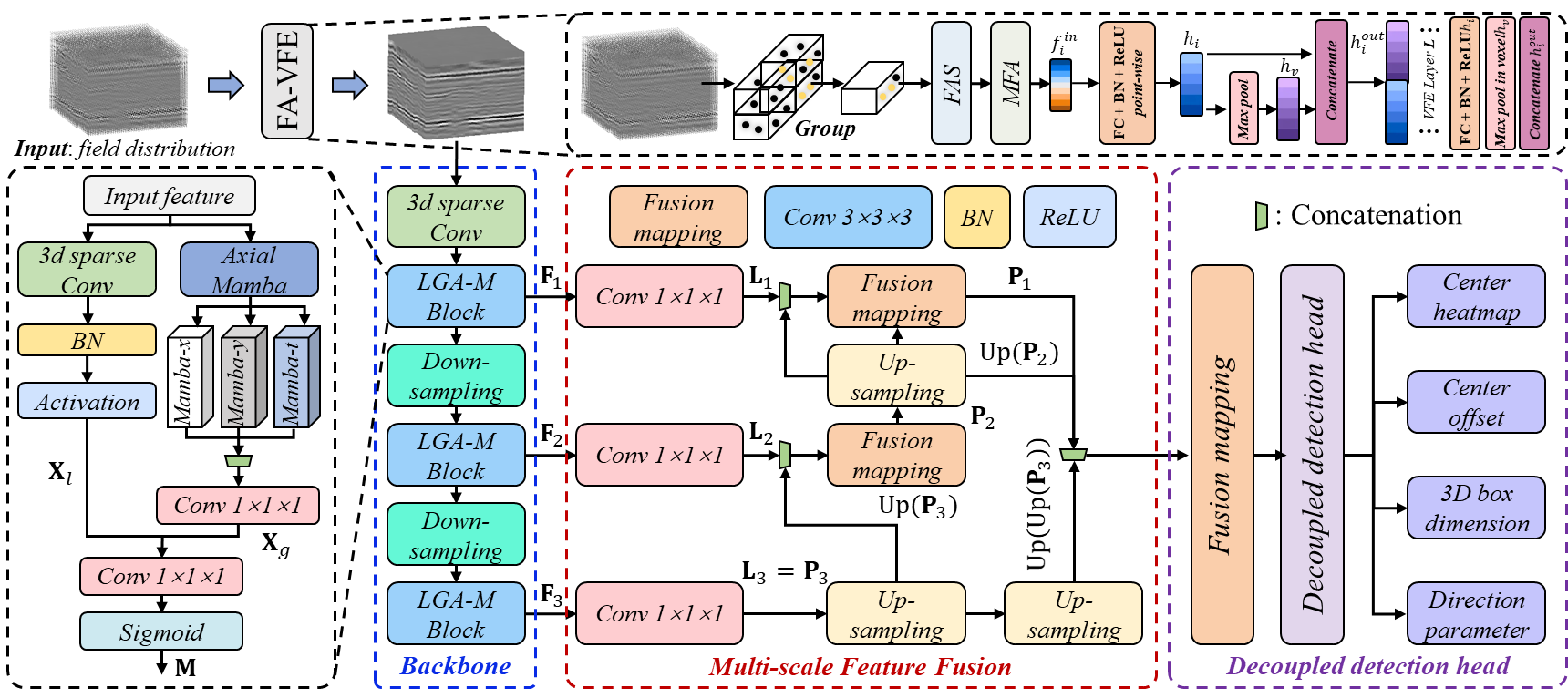
The algorithm automatically processes raw GPR profiles through signal enhancement, feature extraction and multi-scale defect recognition. It identifies abnormal reflection patterns and converts complex radar signals into visual detection results for defect localization, structural evaluation and maintenance decision-making.

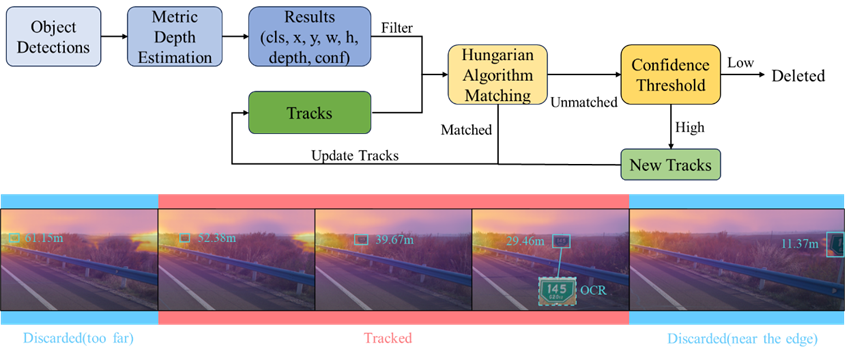
02 · Pavement Imaging
Image-based pavement defect detection with deep learning
Road surface images are collected using vehicle-mounted cameras, providing direct visual information about pavement conditions including cracks, potholes, patching and surface deterioration. High-resolution image acquisition improves the reliability of automatic defect recognition and quantitative analysis.
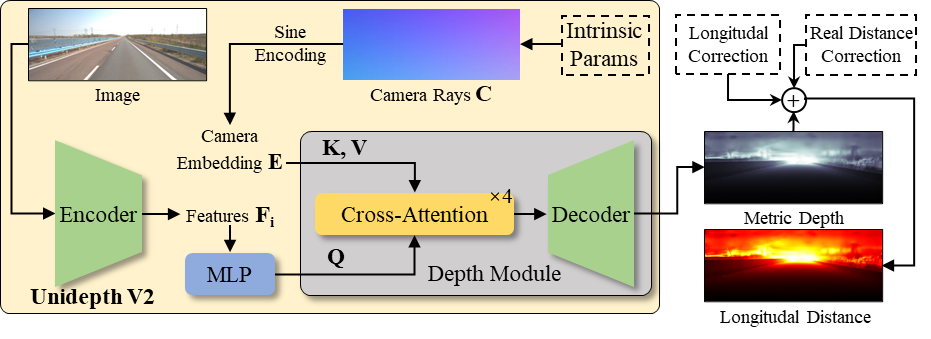
The algorithm extracts visual features and detects surface defects using object detection or semantic segmentation models. It identifies defects with different shapes, sizes and textures under complex road environments, outputting defect categories, locations, segmentation masks and measurable indicators for maintenance planning.


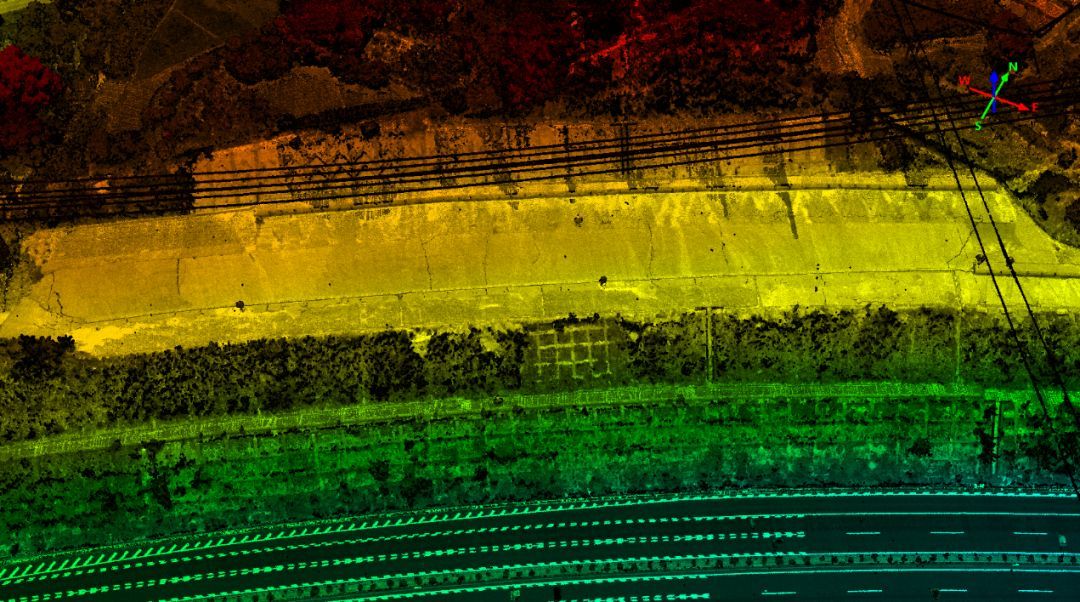
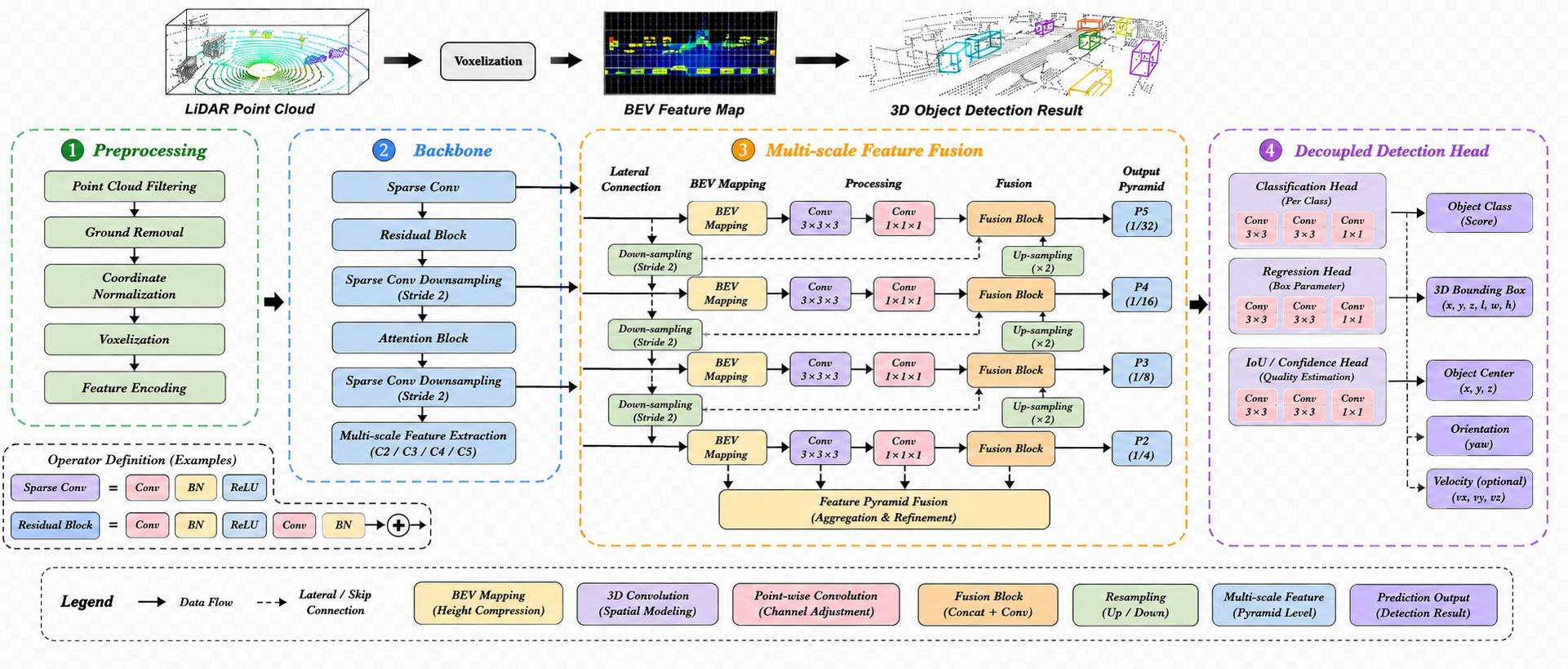
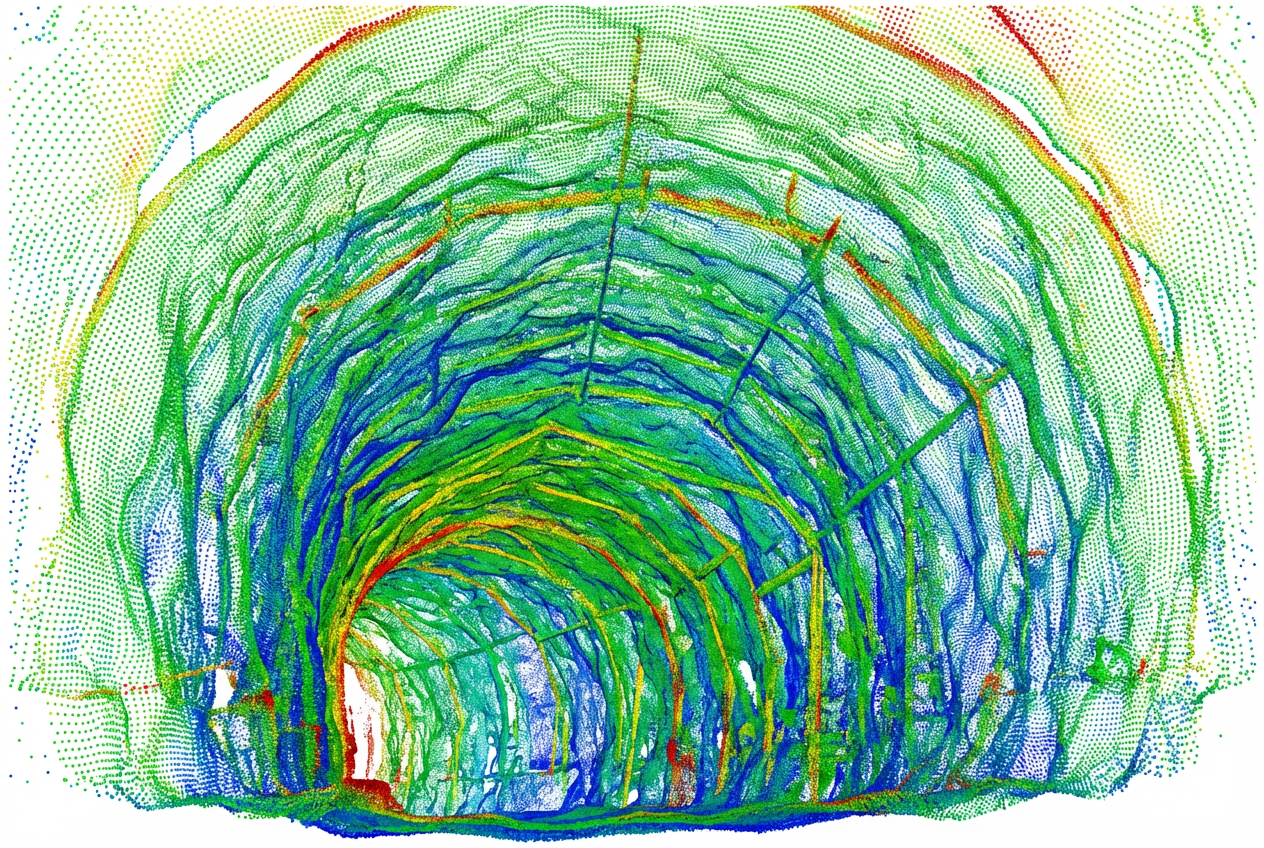
03 · 3D Laser Point Cloud
LiDAR-driven point cloud analysis for geometry & deformation
The inspection platform integrates LiDAR, radar, cameras and other sensors to collect high-density point clouds and multi-source road information. A high-performance computer processes large-scale data, while mobile power supply, lighting and protective supports ensure stable field operation — delivering accurate spatial information for roadway geometry, surface condition and infrastructure feature analysis.
The algorithm processes raw point clouds through filtering, registration, segmentation and feature extraction. It identifies geometric features and detects surface deformation, rutting, clearance changes and structural irregularities, producing classified point clouds, deformation maps and 3D visualization results for engineering assessment.

Application Value
Designed for promotional presentation & technical communication.
Rapid Deployment
Field systems configure for mobile acquisition within minutes, without interrupting traffic flow.
High-Resolution Evidence
Radar, image and point cloud outputs remain sharp enough for expert review and engineering reporting.
Actionable Analytics
Algorithms convert raw sensing data into interpretable detection outputs that engineers can act on.
Multi-Sensor Perspective
Subsurface, surface and spatial geometry are analyzed together within a single technology stack.
Visual Highlights
Representative imagery from the project portfolio.
Click any image to view in full resolution.



Get in Touch
Discuss technical cooperation, demonstrations, or project deployment.
Reach out to explore how our intelligent road inspection algorithms can be applied to your infrastructure projects. We welcome collaboration on demonstrations, research partnerships, and field deployment.